
更新日:2025/09/08
2024年になってようやく明るいニュースが届きました。
国立研究開発法人宇宙航空研究開発機構(JAXA)は、2024年1月20日午前0:20(日本標準時)に小型月着陸実証機(SLIM)が月面へ着陸したことを確認致しました。
JAXA | 小型月着陸実証機(SLIM)の月面着陸の結果について
着陸後の通信は確立しております。
但し、太陽電池が電力を発生していない状況であり、現在、月面からのデータ取得を優先して実施しています。
今後、取得できたデータの詳細な解析を進めます。今後の状況等につきましては随時お知らせいたします。
JAXAは、ホームページにて月面着陸成功を発表。
何かハラハラドキドキの経過でした。
ライブ配信を見ていましたが、スリムは予定通り着陸。
但しいつまで経っても画面は「お待ちください」の表示。
成功かどうかはっきりせず、まさか失敗とか・・・。
午前2時10分過ぎに始まったJAXAの会見では、小型月着陸実証機(SLIM)は日本時間20日午前0時ごろに着陸降下を開始し、同20分ごろ月に着陸した。
着陸後の探査機との交信は確立できているが、搭載した太陽電池が発電しておらず、数時間で電力が尽きる可能性があるという。
月面への無人探査機の着陸成功は、旧ソ連、米国、中国、インドに続く5カ国目。
まずは着陸成功おめでとうございます🎉
これからの情報解析に期待しましょう。
もしかしたら月の起源が分かるかも。
月着陸は成功したの?
1月20日午前0時20分に月着陸成功。
日本初、世界で5番目の快挙だよ。
SLIM (Smart Lander for Investigating Moon) プロジェクト
| 名称 | SLIM (Smart Lander for Investigating Moon) |
|---|---|
| 開発の目的と役割 | ・小型の探査機によって、月への高精度着陸技術の実証を目指す。 ・従来より軽量な月惑星探査機システムを実現し、 月惑星探査の高頻度化に貢献する。 |
| 打上げ日時 | 2023年9月7日 午前8時42分11秒(日本標準時) |
| 場所 | 種子島宇宙センター 大型ロケット発射場 |
| ロケット | H-IIAロケット47号機 |
SLIMは、「月の狙った場所へのピンポイント着陸」、「着陸に必要な装置の軽量化」「月の起源を探る」といった目的を小型探査機で月面にて実証する探査計画です。
2023年9月7日に種子島宇宙センターからH-IIAロケット47号機で打ち上げられ、同年12月25日に月周回軌道への投入に成功した。
月に最も近いところ(近月点)で高度約600km、最も遠いところ(遠月点)で高度約4000kmのだ円軌道で月を周回しており、探査機の状態は正常。
1月14日17時32分に遠月点を低下させて高度約600kmの円軌道に投入された。
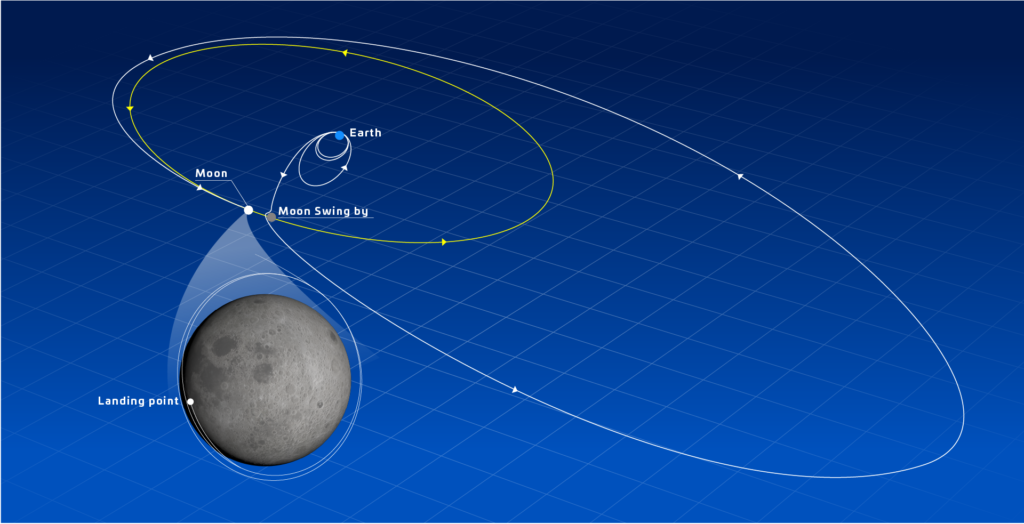
今後、1月19日にはさらに高度を約15kmまで下げた後、20日午前0時に着陸のための降下を始める計画。
月着陸は1月20日午前0時20分ごろを予定している。
また小型探査ロボット「LEV-1」および変形する月面ロボット「LEV-2(愛称:SORA-Q)」も搭載していて、月着陸直前の高度約2m付近から、LEV-1、LEV-2を分離します。
なお、着陸に成功した後は、マルチバンド分光カメラ(Multi-Band Camera:MBC)による岩石の組成測定など月面の調査を進める。
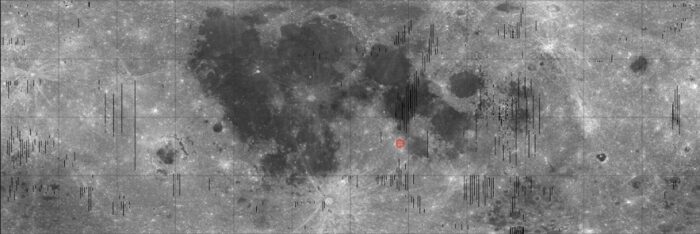
SLIMの着陸目標地点、選定理由
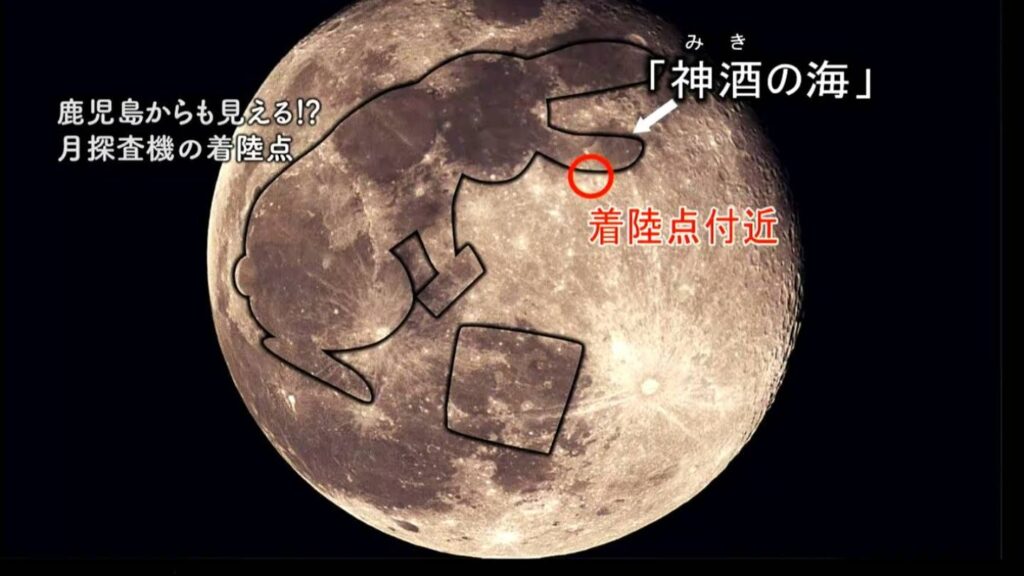
着陸目標地点は、ウサギの餅つきで説明すると、ちょうどウサギの片耳にあたる「神酒の海」と呼ばれる巨大なクレーター付近です。

本日1月19日(金)の深夜、日本の月探査機「SLIM(スリム)」が月面着陸をする予定です。
— 星の観察館「満天星」 (@man_ten_bo_shi) January 18, 2024
着陸予定時刻は1月20日(土)0:20です。
今までの月着陸機の着陸精度は数km~数十kmでしたが、SLIMの精度は100mというピンポイント着陸を目指します。
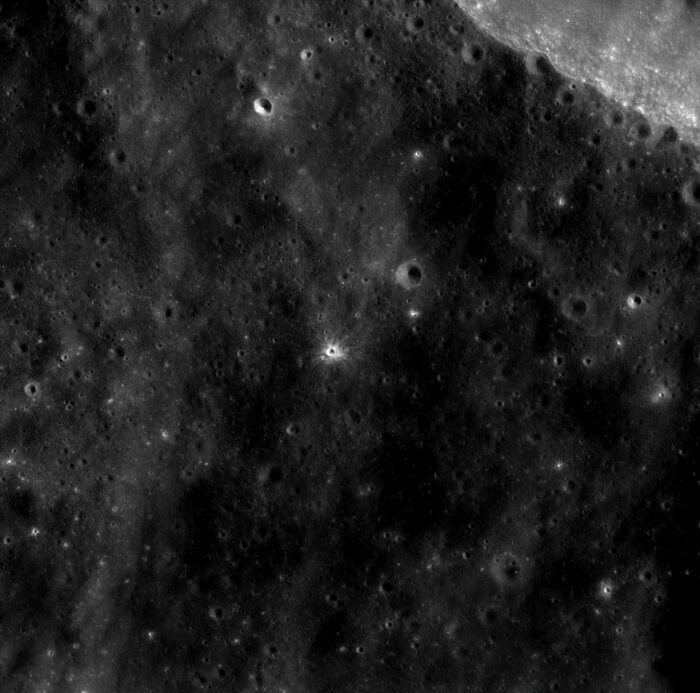
着陸地点は写真の黄色丸内にあるSHIOLI(栞)クレーターです。 pic.twitter.com/RETDxDOOCT
これまでの月面着陸機が降りてきた月の“海”と呼ばれる領域(平坦な場所)だけではなく、斜面に着陸する必要もあります。
小型月着陸実証機SLIM(Smart Lander for Investigating Moon)は「神酒(みき)の海」の近く、15度程度の傾斜地を着陸目標としています。
着陸目標地点の直近にはクレーター「栞(しおり)」、直径約300mがあります。
月周回衛星「かぐや」の成果により、月のクレーター斜面には、月内部から噴出したと考えられる岩石(カンラン石)が掘削され露出している事が分かりました。
そこでSLIMでは、クレーター斜面にピンポイントで着陸し、岩石の組成を調べます。
そのカンラン石を含んだ岩の組成を地球のものと比較することにより、月の形成と進化の謎に迫ります。
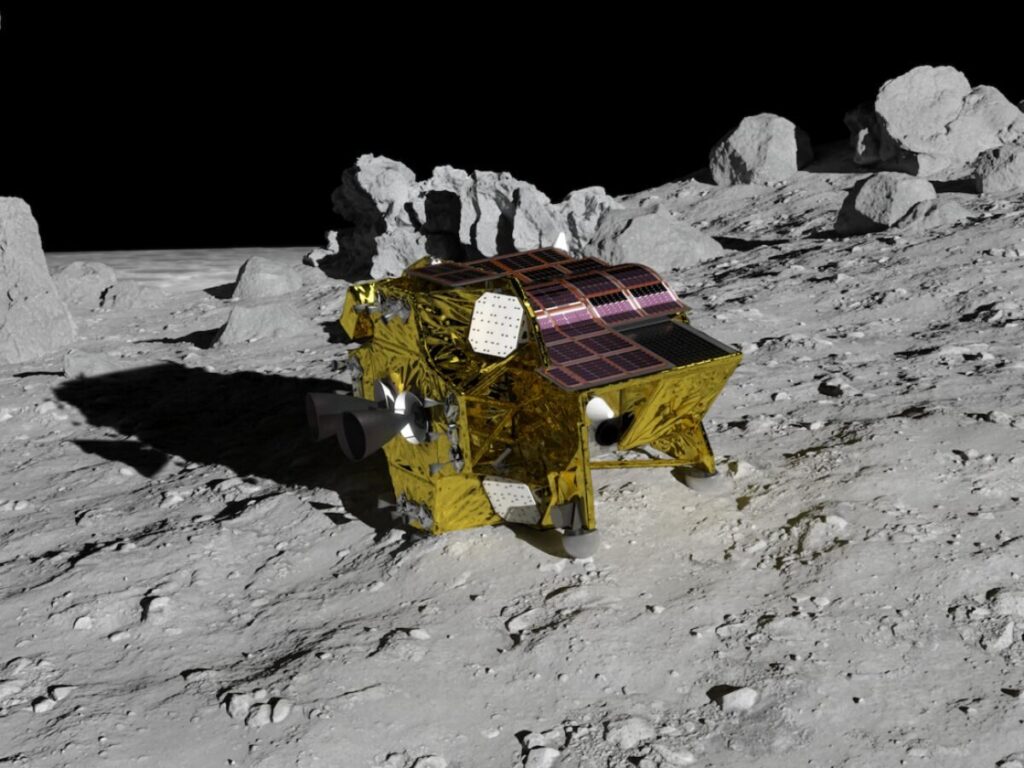
SLIM着陸想定図
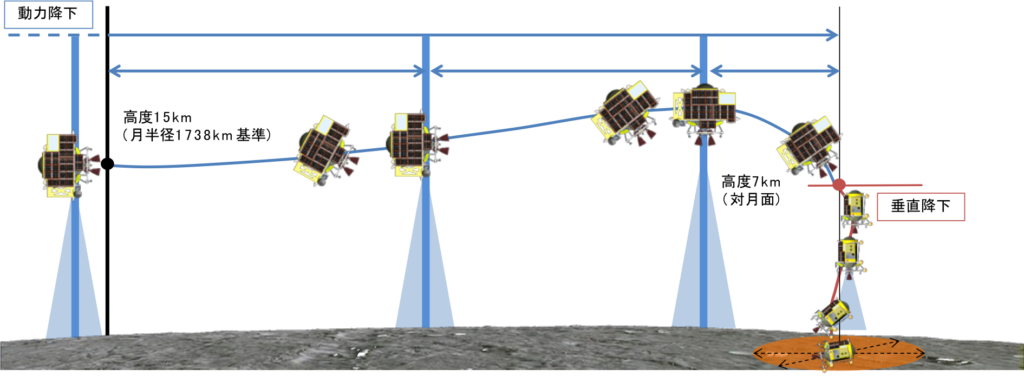
月周回楕円軌道において、地上からSLIMの軌道・位置を決定し、SLIMに通知します。その情報をもとに、SLIMは高度15kmの地点(近月点)でメインエンジンの逆噴射(探査機進行方向とは逆方向に噴射)を開始し、着陸シーケンスに移行します。
SLIMは自動制御により着陸地点の上空に到達します。飛行中に撮影した月面の画像を使って、地図データと照合し現在位置を推定する「画像照合航法」を用い、軌道を自動修正します。
SLIMは着陸地点の上空に到達後、着陸レーダにより高度を検出しながらほぼ垂直に降下し、降下開始時の機体は、秒速1.8km(時速6480km)にもなります。
高度50m地点で、探査機直下の障害物の状況に応じて水平位置の微調整を行います。
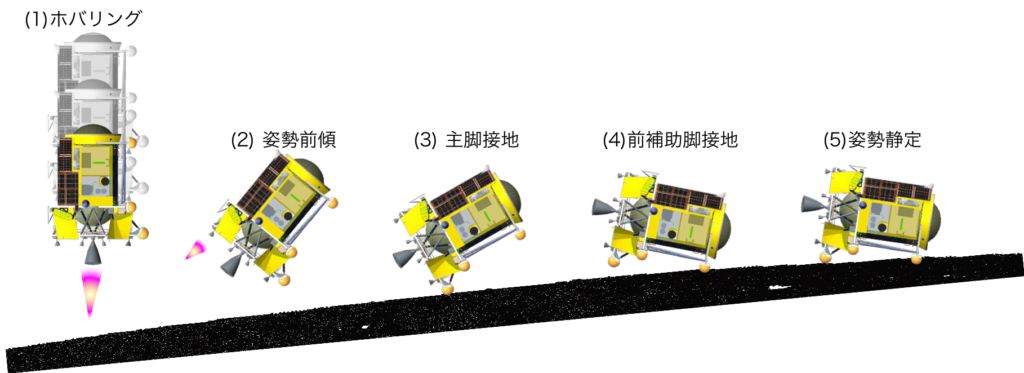
月面近く(高度約3m)に達した時点でメインエンジンをカットオフし、姿勢制御を行いつつ着陸します。
後ろにある主脚が月面に接地した後、機体が前方に倒れ、前側の補助脚も接地する着地法で衝撃を和らげます。
脚は、鋳造会社「コイワイ」(神奈川県)が製造。同社の3Dプリント技術が着陸脚の衝撃吸収材として採用されました。

小型探査機機体

| 高さ | 2.4 m |
|---|---|
| 横 | 2.7 m |
| 厚み | 1.7 m |
| 重量(着陸時) | 210 kg |
| 重量(空時) | 190 kg |
| 着陸精度 | 100 m 以内 |
月へのピンポイント着陸を目指す小型軽量の探査機。
月面探査ロボット「SORA-Q」(ソラキュー)

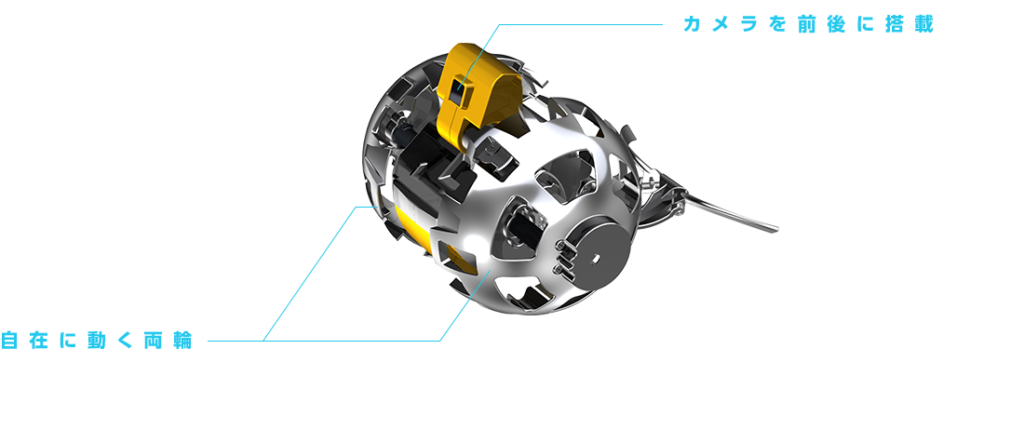
| 項目 | 内容 |
|---|---|
| 名称 | 変形型月面ロボット Lunar Excursion Vehicle 2(略称:LEV-2)が正式名称。 |
| 愛称 | SORA-Q |
| 質量 | 本体約250g |
| サイズ | (変形前)直径80㎜/(変形後)幅約123㎜ 高さ90㎜ 奥行135㎜ |
| カメラ | 前後に1台ずつあるカメラで探査機及び周辺環境を撮像可能。 |
SORA-Qは、JAXA、タカラトミー、ソニーグループ、同志社大学の共同開発によって生まれた、超小型の変形型月面ロボット。
「SORA-Q(ソラキュー)」という愛称は、宇宙を意味する「宙(そら)」から、Qは宇宙に対する「Question(問い)」「Quest(探求)」、「探求」の「求」、「球体」であること、横からのシルエットが「Q」に似ていることなどから名付けられた。
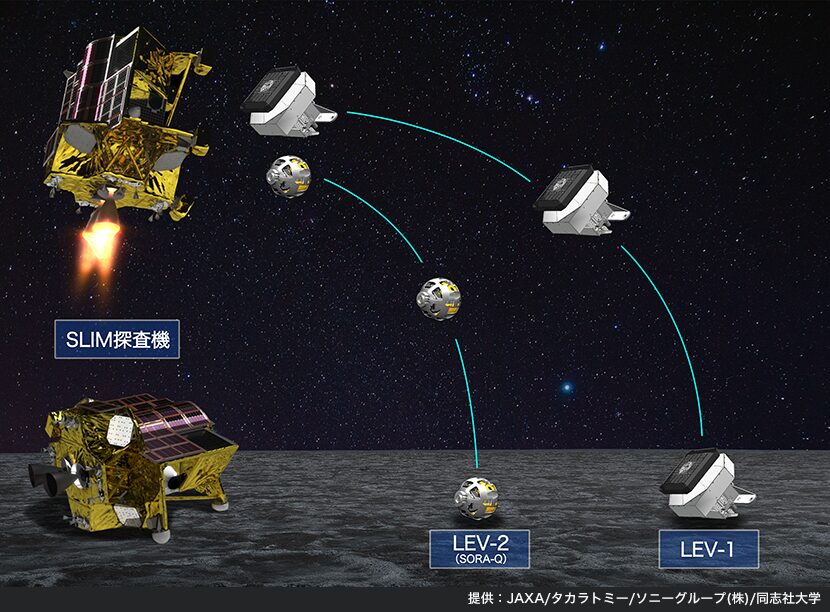

SLIMが着陸に向け自由落下中、小型ロボLEV-1、LEV-2を高度1.8m付近から分離し、月面に落下させます。
LEV-2(SORA-Q)は着陸機から直径約8センチメートルの球体のまま放出され、月面に着陸すると変形を開始し、走行可能な月面ロボットへとその姿を変えます。
SORA-Qは砂をかき分けて体を浮かせながら月面を走行し、搭載されたカメラで着陸機や周囲を撮影、30度の斜面も上れるよう設計されています。
そして、電池が切れるまで活動を続け、ミッションを終えると挙動を停止してそのまま月に。

着陸経過
2024年1月19日に近月点を高度15kmまで低下。その後、1月20日午前0:00頃(日本標準時)に着陸降下を開始し、同0:20頃(日本標準時)に月面着陸成功。
なお、月面着陸の経過は、JAXA YouTube公式チャンネル「JAXA Channel」にてライブ配信され、国内外の20万人以上が見守った。
SLIMは太陽電池の発電を確認できなかったため、午前2時57分にバッテリ残量12%の時点でバッテリーを切り離した。SLIMの太陽電池パネルは西を向いているため、今後太陽の向きによってパネルに光が当たり、太陽電池が復活する可能性もあるという。
着陸降下中や月面で取得した技術データ、画像データの地上への送信は完了したという。
SLIM月面着陸まとめ
JAXAが主導する小型月面着陸実証機ミッションを紹介しました。
「小型月面着陸実証機SLIM」は2023年9月にH2Aロケットによって打ち上げられ、2024年1月20日午前0時20分、日本初の月面着陸に成功しました。
従来の「精度十数~数十km」ではなく着陸精度100m以内という「ピンポイント着陸技術」の実証はこれからの解析によりますが、成功したと考えられます。
アメリカ、中国、ロシア、インドに続く世界で5番目の快挙で、日本の宇宙開発の能力の高さを世界に示しました。
今後の解析とさらなる発展に期待しましょう。
・ブロガー:2021年ブログ開設
・趣味:旅行(国内・海外)、食べ歩き、写真撮影


コメント